Vorwort zum Controller für astronomisch geführten 2-Achs Solartracker.
aktualisiert am 23.07.2020
Dieses Nachbau-Projekt beschreibt einen astronomisch geführten Solartracker mit 2 Achsen.
Der Nachbau erfolgt auf eigenes Risiko! Ich gebe keinerlei Garantie auf Funktion der Hard- und Software!
Auch sind Kenntnisse im Bereich Elektrik, Elektronik und Löten erforderlich. Ein Anfänger sollte sich gut überlegen ob er so ein Projekt in Angriff nimmt.
Wer möchte, kann diese Anlage nachbauen. Ich stelle alle notwendigen Pläne und Informationen bereit.
Auch die Platine, Display und natürlich den Chip mit der Software kann über mich bezogen werden. Ebenso bin ich bei der Beschaffung des Antriebes behilflich.
Hier handelt es sich um eine Inselanlage mit ca. 3,5KW/h. Also sind zwischen 8 und 12 Zellen notwendig um auf diese Leistung zu kommen.
Ich will NICHT ins öffentliche Stromnetz einspeisen sondern Akkus laden und den überschüssigen Teil sofort verbrauchen.
Es werden also die Accus geladen und über einen Frequenzumrichter die Netzspannung erzeugt. Reicht die Akkuleistung nicht aus,
wird über eine Backup-Leitung die Stromversorgung aus dem öffentlichen Stromnetz hergestellt. Somit ist eine unterbrechungsfreie Stromversorgung gesichert.
Um mir die komplexe Eingabe von Standordkoordinaten zu sparen und das System flexibel überall einsetzen zu können, werden die Standortkoordinaten von einem GPS-Receiver geliefert.
Dieser stellt auch Uhrzeit und Datum bereit. Aus diesen Daten kann der Winkel zur Sonne für die horizontale (Azimut)- und vertikale (Elevation) Achse berechnet werden.
Die Berechnung erfolgt über eine recht komplexe Formel, als Ergebnis stehen dann die Winkel zur Sonne bereit. Der Rest ist nur noch Steuer- und Regelungstechnik.
Weiterhin habe ich der Steuerung einen Windsensor spendiert um bei starken Winden den Tracker in eine Schutzposition fahren zu können.
Alles wird über einen Microcontroller der Firma Microchip vom Typ PIC 18F4620 gesteuert. Mit 20 Mhz getaktet erreicht er trotz der
mathematischen Aufgaben eine ausreichende Arbeitsgeschwindigkeit. Der Antrieb der Schneckengetriebe bzw. Motoren erfolgt über eine Leistungsendstufe der Firma Cytron.
Diese ist ausreichend dimensioniert um selbst große Tracker mit bis zu 24 Zoll bewegen zu können.
In meinen Fall kommt ein 7-Zoll Antrieb zum Einsatz der später einmal 8 Zellen mit 16 qm tragen soll.
Mit einem Gewicht von 57 Kg ist der Antrieb stabil gebaut und kann auch problemlos hohe Windlasten aufnehmen.
Da ich in Deutschland keinen Lieferanten für solch einen Antrieb gefunden habe, wurde er aus China importiert. Keine billig Sache.
Ich will an dieser Stelle gleich erwähnen, dass Linearaktuatoren, Schubstangen usw. nicht für den Antrieb geeignet sind!
Ihnen fehlt die Möglichkeit der Positionsrückmeldung. Die Motoren meiner Mechanik sind mit Quadratur-Encoder bzw. Hallsensoren ausgestattet,
die eine sehr genaue Positionierung erlauben (über 1000 Pulse pro Winkelgrad!). Bei anderen Antrieben fehlt diese Art der Rückmeldung.
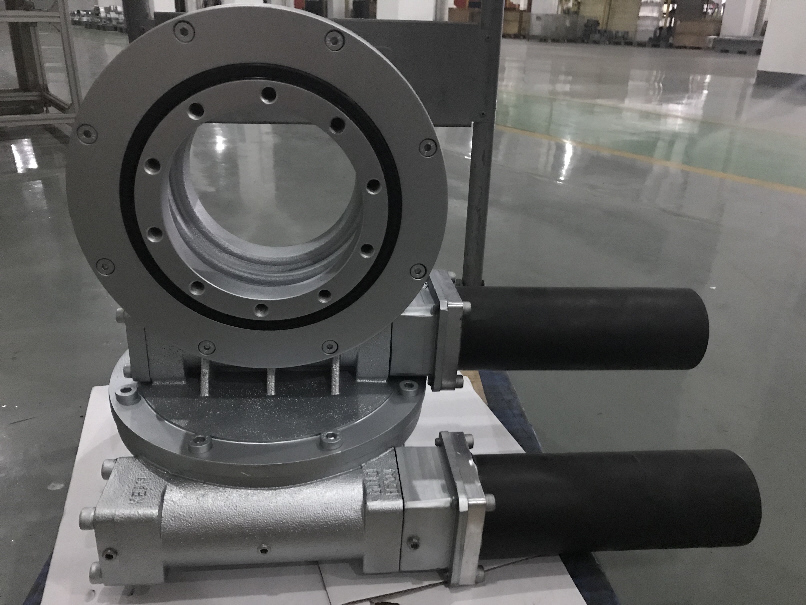 Ein Bild aus der Fertigung des chinesischen Lieferanten:
Ein Bild aus der Fertigung des chinesischen Lieferanten:
Der 7 Zoll Antrieb des Solartracker. Kein Leichtgewicht. Immerhin bringt der Schwenkantrieb 57 Kilo auf die Waage.
Man kann sehr schön die beiden Antriebsachen und die Motoren erkennen.
Der chinesische Lieferant kann Antriebe von 3 Zoll bis 24 Zoll liefern.
Mein Antrieb ist für ca. 8 bis 16 Zellen (max) geeignet. Mit 34 KN in der axialen Richtung und 58 KNin der radialen Richtung
können schon oderdentliche Kräfte bewältigt werden.
Mit ca. 430mm Höhe und 190mm (ohne Motoren) Breite ist es dennoch eine kompakte Einheit.
Das Geschäft mit den Chinesen ist einfacher als gedacht. Man muss sich nur an gewisse Regeln halten und auf lange Lieferzeiten einstellen.
Hat man einen vertrauenswürdigen Lieferanten gefunden, muss man die Ware die man kaufen möchte ganz genau beschreiben, den Preis aushandeln und eine
Vorauszahlung von rund 1/3 des Gesamtpreises zzgl. Transportkosten für TNT zahlen. Hat der Lieferant die Ware fertig zum Versand muss der Rest,
also 2/3 des Preises angewiesen werden. Dann wird die Ware verschickt. Als Lieferant habe ich TNT mit Door to Door Service gewählt.
Die gesamten Zollangelegenheiten und Formalitäten regelt somit das Transportunternehmen.
Ca. 10 Tage nach dem die Mechanik bei mir eintraf bekam ich die Rechnung von TNT über 19% Einfuhrumsatzsteuer und 2,5% Zollgebühren.
Unterm Strich keine billige Sache!
Wohl war mir bei der ganzen Sache nicht, immerhin musste ich eine große Summe vorauszahlen.
Solle etwas schief gehen, war ich mein Geld los, denn einen Rechtsanwalt in China zu beauftragen ist so gut wie unmöglich und sehr teuer.
Ich musste dann aber feststellen, dass die chinesischen Lieferanten sich größte Mühe geben, zuverlässig arbeiten und auch zu liefern.
Nur so können Sie sich Marktanteile in Europa sichern.