Inbetriebnahme des astronomisch geführten 2-Achs Solartracker.
aktualisiert am 10.11.2019
Inbetriebnahme
Wichtig bei der Inbetriebnahme ist, das man sich genau an den hier beschriebenen Ablauf hält. Die Motoren haben unglaublich viel Kraft.
Aus diesem Grunde werden die Steuerleitungen (J7) für die Motorenendstufe noch NICHT angeschlossen !
Dazu wird der Stecker zur Motorenendstufe abgezogen! Der Tracker-Controller benötigt auch noch keine Versorgungsspannung!
Ein Hinweis für die Bezeichnungen CW und CCW bedeutet:
CW = clockwise, englisch für: "im Uhrzeigersinn". rechts drehend, Richtung West
CCW = counter clockwise, englisch für: "gegen den Uhrzeigersinn", links drehend, Richtung Ost.
Für den Y-Antrieb gilt:
CW = Drehung hoch, Richtung 90 Grad.
CCW = Drehung runter, Richtung 0 Grad.
Die Kontakte in den Endschalter "S1" Sxs (Schliesser) und "S2" Sxö (Öffner) befinden sich jeweils in einem Endschalter !
Das "x" steht für 1 bis 4.
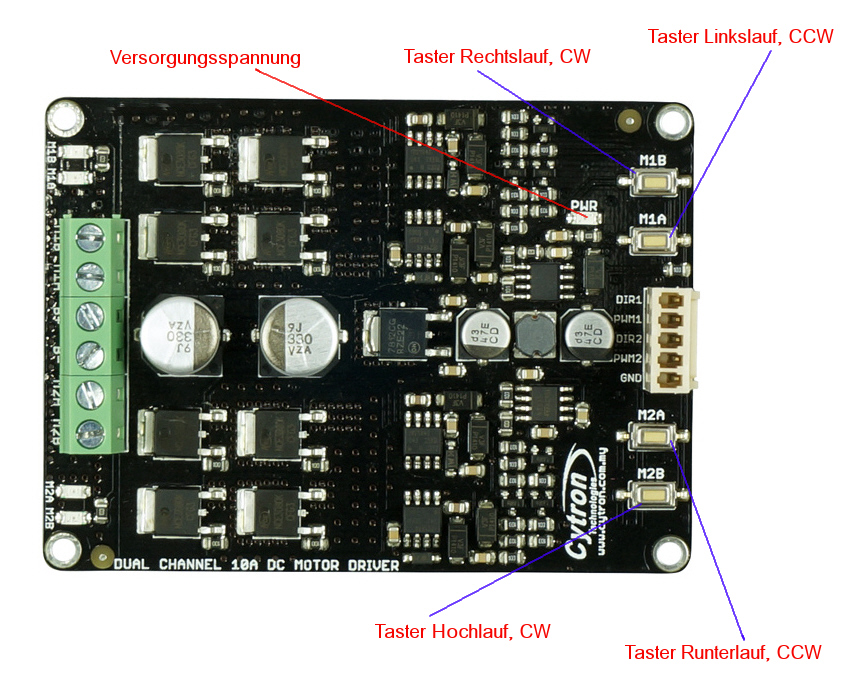
Nach dem Einschalten der Versorgungspannung leuchtet die grüne LED "PWR" auf der Endstufe.
Nun kann zuerst die Laufrichtung der Motoren und die Funktion der Zwangsabschaltung getestet werden.
Zuerst sollte aber sicher gestellt werden, das die Motoren frei drehen können und nicht vor ein Hinderniss fahren können.
Nun kann die Laufrichtung der Motoren und die Funktion der Zwangsabschaltung getestet werden.
Wird der Taster "M1B" betätigt, muss der Horizontal-Antrieb Richtung CW (rechts) drehen.
Wird der Taster "M1A" betätigt, muss der Horizontal-Antrieb Richtung CCW (links) drehen.
Mit dem Taster "M2A" muss der Antrieb die Y-Ache nach unten (CCW) fahren, mit dem Taster "M2B" muss der Y-Antrieb nach oben (CW) drehen.
Sollte die eine oder andere Drehrichtung nicht stimmen, müssen die Anschlüsse für den jeweiligen Motor vertauscht werden.
 Mit diesen Tasten lassen sich die Motoren von Hand steuern. Wärend des normalen Betriebes düfen die Tasten NIEMALS betätigt werden.
Mit diesen Tasten lassen sich die Motoren von Hand steuern. Wärend des normalen Betriebes düfen die Tasten NIEMALS betätigt werden.
Die Software bekommt von den Motorbewegungen nichts mit und kann den Tracker nicht mehr genau nachführen!
Als nächstes wird die Notabschaltung bzw. Zwangsabschaltung geprüft. Diese ist unabhängig vom Controller und dient zur Sicherheit,
falls die Steuerung mal ausfällt, schaltet die Zwangsabschaltung an den jeweiligen Endschalter die Motoren ab.
Mit Betätigung des Taster "M1A" wird sich der Motor in Richtung CCW (Linkslauf) bewegen. Wenn jetzt der Endschalter "S1" an der Home-Position (60 Grad)
betätigt und gehalten wird, muss der Motor abschalten. Mittels des Taster "M1B" bei weiterhin gedrückten Endschalter sollte sich der Motor in
umgekehrter Richtung wieder verfahren lassen. Schaltet der Motor nicht ab, wurde die Diode im Endschalter (Home-Position) 60 Grad
falsch herum eingebaut und muss umgedreht werden.
Nun wird der Endschalter "S2" der Max-Position (340 Grad) geprüft.
Dazu den Taster "M1B" betätigen. Wird nun der Endschalter "S2" für die Max-Position betätigt UND gehalten, muss der Motor abschalten.
Mittels des Taster "M1A" muss sich der Motor entgegengesetzt Richtung (CCW) Parkposition bewegen. Falls der Motor nicht stoppt, wurde die Diode
falsch herum eingebaut.
Die gleiche Prozedur für die Y-Achse:
Mittels des Taster "M2A" den Motor in Richtung unten (CCW) fahren, den Endschalter "S3" in Parkposition (8 Grad) betätigen und halten!
Der Motor muss anhalten, nun den Taster "M2B" betätigen. Der Motor muss sich bei betätigten Endschalter "S3" in die andere Richtung (CW) fahren lassen.
Nun noch die letzte Funktion prüfen. Taster "M2B" betätigen, dann Endschalter "S4" betätigen und halten. Der Motor muss stoppen,
sich aber mittels Taster "M2A" in die gegen gesetzte Richtung verfahren lassen.
Die Endschalter "S5s" und "S6s" werden weiter unten beschrieben.
Für das weitere Vorgehen sollten nun alle Anschlüsse hergestellt, und die Endschalter angebracht werden.
Endschalter "S1" auf genau 60 Grad horizontal, "S2" auf genau 340 Grad horizontal. Der Endschalter "S3" auf genau 8 Grad vertikal,
der Endschalter "S4" auf genau 90 Grad vertikal.
Eine Möglichkeit des Ausrichten der Endschalter:
Bevor das Fundamet für den Tracker erstellt wurde habe ich mit dem Kompass den Winkel von 60 Grad ausgemessen und eine Schnur in dem
Winkel über den Mittelpunkt des Mastes gespannt. Genau in der Flucht der Schnur 3 Meter neben dem Fundament Eisen eingeschlagen. Somit konnte ich den Winkel
ausmessen ohne irgend welche Metallteile in den Nähe zu haben.
Den vertikalen Winkel von 8 Grad kann man leicht mit einem Pendel-Winkelmesser oder Neigungsmesser bestimmen.
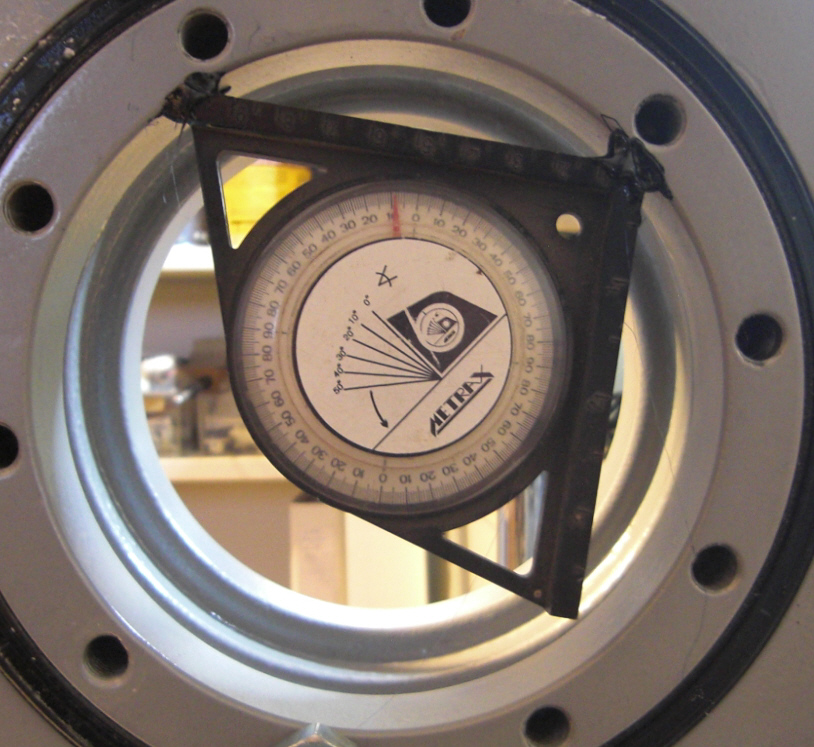 Dieser Neigungsmesser kosten nicht viel (ca. 3,-- Euro) und ist dennoch sehr genau.
Dieser Neigungsmesser kosten nicht viel (ca. 3,-- Euro) und ist dennoch sehr genau.
Wer bei EBAY ein wenig sucht wird schnell fündig. So lässt sich den Winkel von 8 Grad genau einstellen.
Ich habe kurzerhand den Neigungsmesser mit der Heissklebepistole befestigt und so den Endschalter "S3"
genau auf 8 Grad eingestellt. Aber auch digitale Winkelmesser verrichten ihren Dienst.
Es gibt auch ausreichend kostenlose Apps fürs Handy. Die Genauigkeit ist vollkommen ausreichend.
Der horizontale Winkel (60 Grad) und der vertikale Winkel (8 Grad) ist die Parkposition des Tracker. Diese Position wird
immer zur Syncronisation und als Parkposition angefahren. Die jeweiligen Winkel sollten genau ausgemessen werden, da diese
auch zum Anlernen der Motoren verwendet wird. Ausserdem hängt von den Position auch die Genauigkeit des Trackers ab.
Umstellung des GPS-Receiver auf 57600 Baud
Im nächsten Schritt muss der GPS-Empfänger eingerichtet werden. Normalerweise werden die GPS-Receiver mit einer Baudrate von 9600 Buad geliefert.
der Controller arbeitet aber mit 57600 Baud. Also muss der Empfänger umgestellt werden. Eine normale serielle Schnittstelle kann nicht benutzt werden,
Da alles mit TTL-Pegel (5 Volt) arbeitet ist ein USB-Seriell-Wandler erfordelich. Es sollte eine Adapter mit FTDI-Chip sein!
Nach Anstecken des Adapter an die USB-Schnittstelle wird meist der passende Treiber von Windows installiert und der Adapter ist betriebsbereit.
Dann muss der GPS-Empfänger und der USB-Adapter verbunden werden. Die 5 Volt Versorgungsspannung wird praktischer Weise vom Adapter geliefert
Der Anschluss an den GPS-Empfänger wird wie folgt vorgenommen.
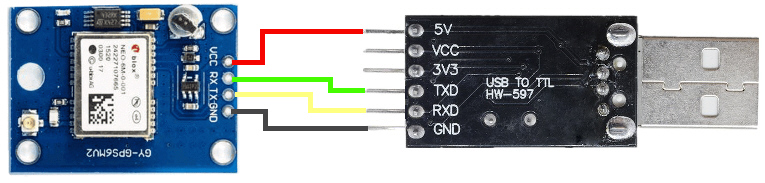 Mit diesen USB-Serielladapter (mit FTDI-Chip) habe ich die besten Erfahrungen gemacht. Er kann auch gleich den GPS-Empfänger mit Spannung versorgen,
Mit diesen USB-Serielladapter (mit FTDI-Chip) habe ich die besten Erfahrungen gemacht. Er kann auch gleich den GPS-Empfänger mit Spannung versorgen,
und er funktioniert auch einwandfrei unter Windows 10! Bei einem Preis von rund 2 Euro kann man nicht meckern.
Adapter Typ PL2303 von Profilic habe ich nicht zur Arbeit unter Windows 10 bewegen können.
Möglich, dass ich eine Nachbau erwischt habe, der von Win10 nicht unterstüztz wird
Nun wird zwingend die kostenlose Software u-center der Firma uBlox benötigt. Ich kenne keine andere Software mit der sich die Baudrate umstellen lässt. Nach der Installation der Software und Anschluss der GPS-Receiver an den USB-Seriell-Adapter
kann hier nachlesen wie die Programmierung auf 57600 Baud erfolgt.
Nach der Programmierung des GPS-Empfänger kann dieser an den Controller angeschlossen werden.
Display Anschluss
Als letztes muss noch das Display programmiert und angeschlossen werden.
Wie bereits in der Controller-Beschreibung erwähnt handelt es sich um ein programmierbares, serielles 3,5 Zoll TFT-Display mit einer Auflösung von 380 x 400 Pixel.
Obwohl das NEXTION-Display seriell betrieben wird, ist es unglaublich schnell. Durch die Programmierung können Texte, Textpositionen und
auch die Farben schon vorher festgelegt und im EEprom des Display abgelegt werden.
Das Programm als Binärdatei findet man hier. Zur Übertragung des Programms wird eine MicroSD-Card benötigt.
Es reicht die kleinste MicroSD-Card (4 GB) für diesen Vorgang.
Die Datei muss auf eine MicroSD-Card kopiert werden und dann auf der Rückseite des Display in den Card-Slot gesteckt werden.
Dann wird das Display an 5 Volt angeschlossen werden. Die Anschlüsse "RX" und "TX" bleiben hierbei unbenutzt. Die Programmdaten werden dann augenblicklich auf das Display übertragen.
Folgen Sie den Anweisungen auf dem Display!
Nach ca. 5 Sekunden ist die Übertragung beendet. Dann die Versorgungsspannung vom Display trennen und die SD-Card entfernen.
Nachdem das Display komplett an den Controller angeschlossen wurde ist auch der letzte Schritt zum Start des Tracke erledigt.
Anlernen der Motoren
Wer den gleichen Tracker bzw. Antrieb wie ich benutzt (7 Zoll) kann diesen Schritt überspringen, da die notwendigen Parameter bereits im EEProm abgelegt sind.
Es muss sicher gestellt sein, dass die 4 Endschalter (60 Grad und 240 Grad der X-Achse, 8 Grad und 90 Grad der Y-Achse richtig positioniert sind.
Ansonsten ist wie folgt vorzugehen. Jumper "Setup" (J 11) stecken und den Tracker einschalten.
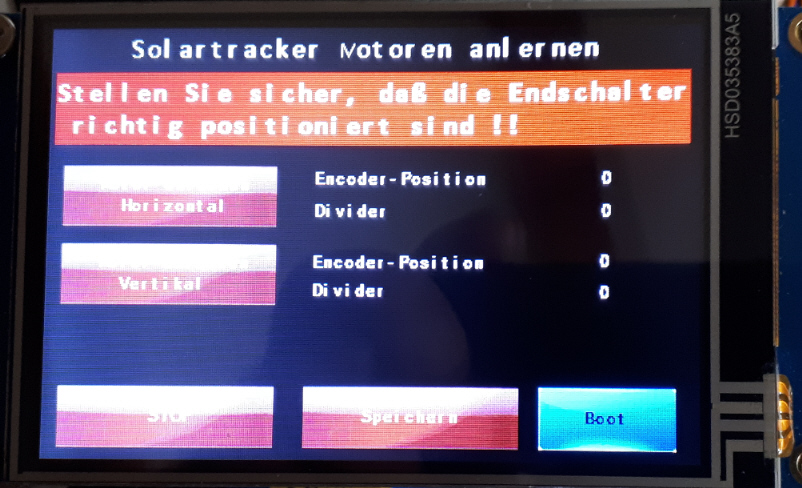 In diesem Menue werden die Motoren angelernt.
In diesem Menue werden die Motoren angelernt.
Für jede der beiden Achsen kann die genaue Strecke abgefahren werden und daraus die Schritte (Pulse der Hallsensoren) pro Winkelgrad berechnet werden.
Die berechneten Daten werden im EEProm des Controller gespeichert und sind selbst bei Stromausfall gesichert.
Wichtig ist, dass die Endschalter genau ausgerichtet sind um sicher zu stellen,
dass der Tracker in der X-Achse 240 Grad und in der Y-Achse 82 Grad abfahren kann.
Um immer den genauen Winkel zur Sonne ansteuern zu können ist eine Rückmeldung der Motorenposition erforderlich. Dieses wird über die Hallsensoren
bzw. Quadraturencoder erreicht. Diese liefern ein um 90 Grad versetztes Signal welches vom Controller ausgewertet wird. Somit kann die genaue
IST-Position des Trackers bzw. des Antriebs bestimmt werden. Beim Anlernen wird also der Faktor bestimmt, den die Motoren pro Winkelgrad erzeugen.
Bei meinem 7 Zoll-Antrieb sind das ca. 1020 Impulse pro Winkelgrad. Damit lässt sich eine sehr genaue Positionierung realisieren.
Andere Antriebe bzw. Motoren haben andere Getriebe verbaut. Aus diesem Grunde muss der Faktor neu bestimmt werden.
Beim Anlernen der X-Achse werden genau 180 Grad abgefahren (60 bis 240 Grad) und daraus den Faktor bestimmt.
Bei der Y-Achse werden 82 Grad ausgemessen (8 Grad bis 90 Grad) um den passenden Faktor zu erhalten.
Zuerst wird mit Betätigen des Button "Motor Anlernen Horizontal" die X-Achse ausgemessen und mit dem Buttonn "Motor Anlernen Vertikal" die Y-Achse ausgemessen.
Der Vorgang kann jederzeit mittels des Button "Stop" unterbrochen werden.
Sollte die Anzeige der Encoder-Position nicht höchzählen, sind entwerden die Motoren falsch angeschlossen oder die Kanäle des
jeweiligen Hallsensor bzw. Quadratur-Encoder vertauscht sein.
Sind beide Aches ausgemessen, werden die Daten mittels des Button "Speichern" dauerhaft im EEProm des Controller gespeichert.
Danach den Jumper "Setup" (J 11) entfernen und den Button "Boot" betätigen. Der Controller startet neu....."
Einschalten des Tracker
Nachdem nun alles programmiert und angeschlossen ist, kann der Tracker gestartet werden. Dazu die Versorgungsspannung anlegen. Beim ersten Start kann es sehr lange dauern bis der
GPS-Empfänger genügend Satelliten zur Positionsbestimmung gefunden hat. Es können bis zu 15 Minuten vergehen bis gültige Daten empfangen werden.
![]()
Der Tracker wartet auf GPS-Daten:
LED 16 signalisiert ein Datenpaket. LED 11 zeigt an, wenn ein gültiges Datenpakt empfangen wurde.
Sollten ausreichend Satelliten empfangen werden, kann der GPS-Receiver seine genaue Position bestimmen. Damit kann der Tracker seine Arbeit aufnehmen.
Allerdings ist noch etwas Fein-Tuning nötig. Dazu muss gewartet werden bis der Controller im Status den Text "warte" anzeigt.
Dann kann man mit dem Button "Setup" in das Menue für div. Einstellungen gelangen.

In dem Setup werden die Feinheiten des Trackers eingestellt.
Es können folgende Parameter eingestellt werden.
° Sturmpause (Verweildauer des Tracker in Schutzposition bei Überschreiten der Windstärke)
° Schutzposition (Position des Trackers um möglichs wenig Angriffsfläche bei startem Wind zu bieten)
° Zeitanzeige (Anzeige Sommerzeit (UTC+2) oder Normalzeit UTC+1))
° Einheit für Windgeschwindigkeit (Km/h oder m/Sek)
Die Schutzposition des Tracker sollte so ausgewählt werden, dass es in der Vertikalen ca. 40 bis 60 Grad einnimmt. Auf keinen Fall
sollte das Panel die Funktion eines Segel haben. 90 Grad sind aber auch zuviel, da dieses wie ein Flugzeugflügel wirkt.
Diese Positionen müssen also individuell ermittelt werden um eine möglichst kleine Angriffsfläche für den Wind zu bieten.
Mit dem Button "Daten speichern" werden die Einstellungen dauerhaft im EEPrm des Controller abgelegt.
Mit dem Button "zurück" nimmt der Tracker seine normale Arbeit wieder auf.
Bremsfunktion der Motoren
Die Motoren laufen sanft an und Bremsen auch sanft wieder ab. Dadurch wird verhindert, dass die Zellenkonstruktion schlagartig zu stehen kommt.
Das kann die Software aber nur durchführen, wenn Trackerposition bekannt ist. Wenn der Tracker neu gestartet wird, ist aber keine Position bekannt.
Um sich zu syncronisieren, fährt der Tracker zuerst in Parkposition und nimmt dann seine Arbeit auf.
Aber bei Erreichen der Endschalter "S1" und "S3" bleiben die Motoren schlagartig stehen. Das ist auch schlecht für das Getriebe.
Hier kommen die Endschalter "S5" und "S6" ins Spiel. Diese sind ca. 2 Grad vor dem Erreichen der Endposition angebracht und
leitend den Bremsvorgang ein. Die genaue Position von S5 und S6 müssen in der Praxis ermittelt werden. Sie sind so einzustellen,
das die Motoren langsam bis zum Stillstand abbremsen.
Als Endschalter kommen normale Schliesser zum Einsatz. Allerdings in der IP65-Ausführung!
Wer Fragen oder Verbesserungsvorschläge hat, kann mich per Mail kontaktieren.